






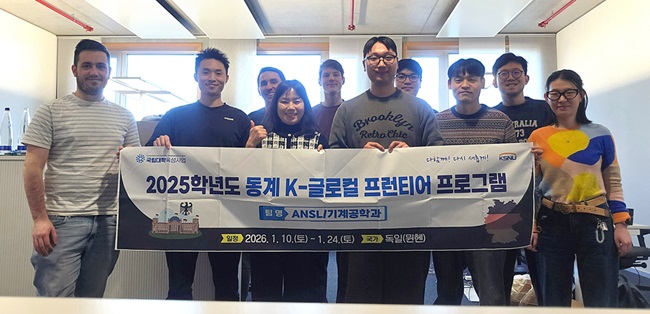
국립군산대학교와 독일 뮌헨공과대학교가 비정형 환경에서 자율주행 안정성 향상을 위한 기술 공동 검증과 연구 교류를 가졌다.
군산대 기계공학과 ‘ANSL’팀(지도교수 김선영‧김화석‧엄지현)은 2025학년도 동계 K-글로컬 프런티어 프로그램 일환으로 독일 뮌헨공과대(TUM) 모바일 로보틱스 랩과 함께 이같은 국제 공동연구와 학술 교류를 성공적으로 마무리했다고 밝혔다.
이번 공동연구는 농경지나 험지처럼 형태가 일정하지 않은 환경에서도 자율 이동 로봇이 안 전하게 이동할 수 있도록 돕는 기술을 개발하는 데 목적이 있다.
특히, 외부 인프라나 미리 만들어진 지도에 의존하지 않고 로봇이 스스로 주변 지형을 인식해 이동 가능 여부를 판단하는 기술에 초점을 맞췄다.
연구팀은 기존처럼 장애물 유무만 판단하는 방식에서 나아가 지형 형태 변화를 연속적으로 분석하는 새로운 접근 방법을 함께 검토했다.
또한, ANSL팀은 깊이 카메라를 활용해 지면의 입체적 정보를 수집하고 이를 기준 좌표로 변환하는 방법을 적용해 센서 설치 위치나 각도에 따른 오차를 줄인 후 지면 굴곡이나 형태 변화와 같은 특징을 분석해 로봇이 안전하게 이동할 수 있는지 판단 기준으로 활용하는 방안을 제시했다.
독일 TUM 모바일 로보틱스 랩은 자율주행 로봇 분야에서 강점을 가진 연구기관으로 다양한 센서를 활용한 위치 인식 기술과 정밀 지도 생성, 환경 인식 연구 경험을 바탕으로 기술 교류를 진행했다.
양 기관은 지형 정보를 활용한 주행 판단 기술이 향후 경로 설정과 주행 제어 과정에서 어떻게 활용될 수 있는지 심도있게 논의했다.
더불어 ANSL팀은 TUM 연구시설을 직접 방문해 실제 로봇 장비와 실험 환경을 살펴보고 비정형 환경에서 주행 실험 설계 방법과 데이터수집 전략에 대해 의견을 나눴고 이를 통해 이론 연구와 실제 실험을 연계한 국제 공동연구 가능성을 확인했다.
김화석 학생은 “TUM 모바일 로보틱스 랩을 직접 방문해 현지 연구원과 학생들이 연구를 수행하는 과정을 가까이에서 접한 뒤 연구 접근 방식과 문제 정의 방식에 대해 새롭게 깨닫는 계기가 됐다”고 말했다.
김선영 교수는 “이번 국제 공동연구는 비정형 환경 자율주행 문제를 단순한 장애물 회피가 아닌 지형의 구조적 특성을 해석하는 문제로 재정의했다는 점에서 의미가 크다”며 “농업, 건설, 재난 대응 등 다양한 분야 필드 로봇 시스템으로 연구를 확장해 나갈 계획이다”고 밝혔다.